Climbing is locomotion over vertical or steeply inclined surfaces, and it is the principle means of getting around for many arboreal mammals and those living on irregular or very steep terrain. Climbing or ‘scansorial’ mammals face many challenges, including overcoming gravity, maintaining balance and negotiating obstacles – all with a range of movements heavily restricted by the limited available support. There are two basic types of climbing – the first involves the animal interlocking some part of its body with the support – in mammals this is usually the claws (fig.22-1). The second involves grasping – using the hands, feet or tail. As well as a means of attachment to the support, climbing also requires balance – an ability to maintain body posture in a potentially unstable location. Adaptations for overcoming the challenge of balance include grasping appendages (usually hands and feet but also sometimes a prehensile tail), relatively short limbs, reduced body size to limit top-heaviness and allow the weight to be easily shared easily between the points of attachment and ability to hang below the support, using gravity to stabilize their position(Fig.22-2, ref.5).

Fig. 22-1 Two types of climbing.
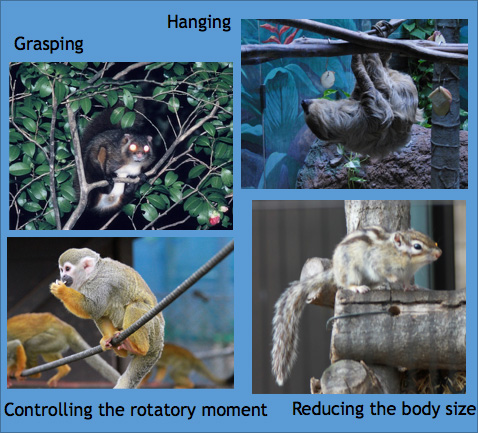
Fig. 22-2
Squirrels are members of the large and highly successful mammal order Rodentia, members of which have adapted to a wide variety of environments and lifestyles. The tree and flying squirrels are highly specialized to an arboreal and scansorial way of life. One of the most striking features of the group is their ability to run down trees head-first, with the hind feet rotated 180 degrees so that the claws continue to hook into the tree surface and provide support(Fig.23). They owe this ability to the extraordinary mobility of the ankles – in particular the joint between the talus (ankle bone) and the calcaneus (heel bone,ref.16).
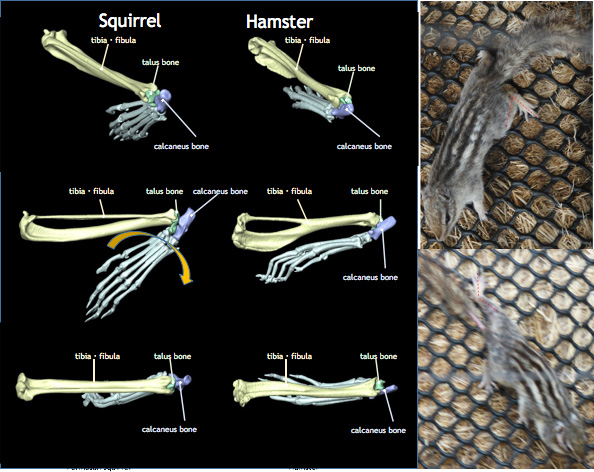
Fig. 23 Comparative 3D CT scans of the ankle and foot joint of an arboreal and terrestrial rodent -
a squirrel and a hamster. Note the rotation of hind foot of squirrel(red lines).
The southern tamandua is one of four living species of anteater. These strange-looking South American mammals lack teeth and feed almost exclusively on ants and termites. To find their prey, they use powerful forelegs with greatly enlarged claws to break open the hard-baked earth of ant and termite mounds, then slurp up the insects with their long worm-like tongue. On the ground, tamanduas move awkwardly. The long, muscular tail seems too heavy and the fingers of the forefeet are flexed and turned inward so that the claws do not catch on the ground and the animal walks on its knuckles. However, when a tamandua takes to the trees the reason for its odd combination of features becomes clear. Tamaduas are also adapted for climbing. The strong digits and claws help grip branches and the tail acts a balancing aid(ref.16).
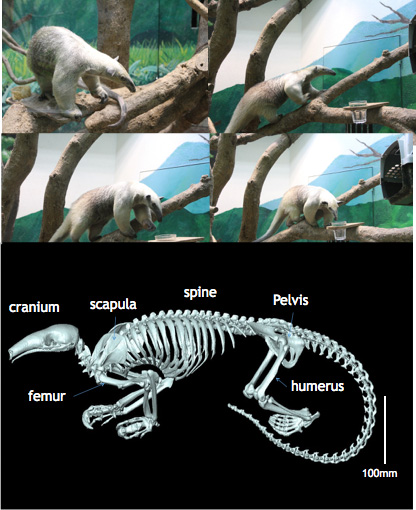
Fig. 24 The climbing and skeleton of Tamandua. Note the developing arm and claws of Tamandua.
Sloths are relatives of anteaters and no less strange to look at. Yet in their way, they are also highly successful mammals. They are well known for their leisurely arboreal lifestyle, which is an adaptation to reduced energy consumption. The metabolic rate of a sloth is about 40-45% what might be expected for its body weight, and the major muscles used for locomotion expend roughly half the energy of those in a similar-sized terrestrial mammal. Instead of standing on its legs, the sloth uses them to suspend its body from branches or cling to tree trunks. The majority of sloth muscles are retractors – concerned with grip and climbing rather than extensors, which are more associated with weight-bearing. In this way, all four limbs of a sloth are more like arms than legs. The fingers are not separated or capable of independent movement, so the sloths appear to lack obvious hands or paws – the large claws sprout from the ends of the arms and claws form hooks from which the animal hangs. The key weight-bearing structures used by a dangling sloth are its thin, curved spine, long limbs and the large claws(ref.17).
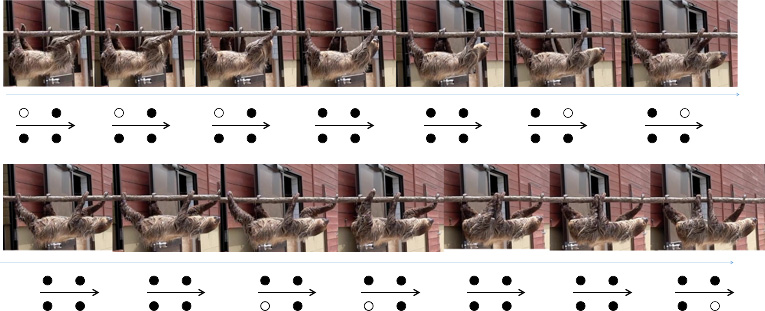
Fig. 25-1 Continuous pictures of sloth locomotion . The filled circles of diagrams below photos show
the limbs that support the body. Movement of limbs of sloth is similar to the lateral walk of the
elephant
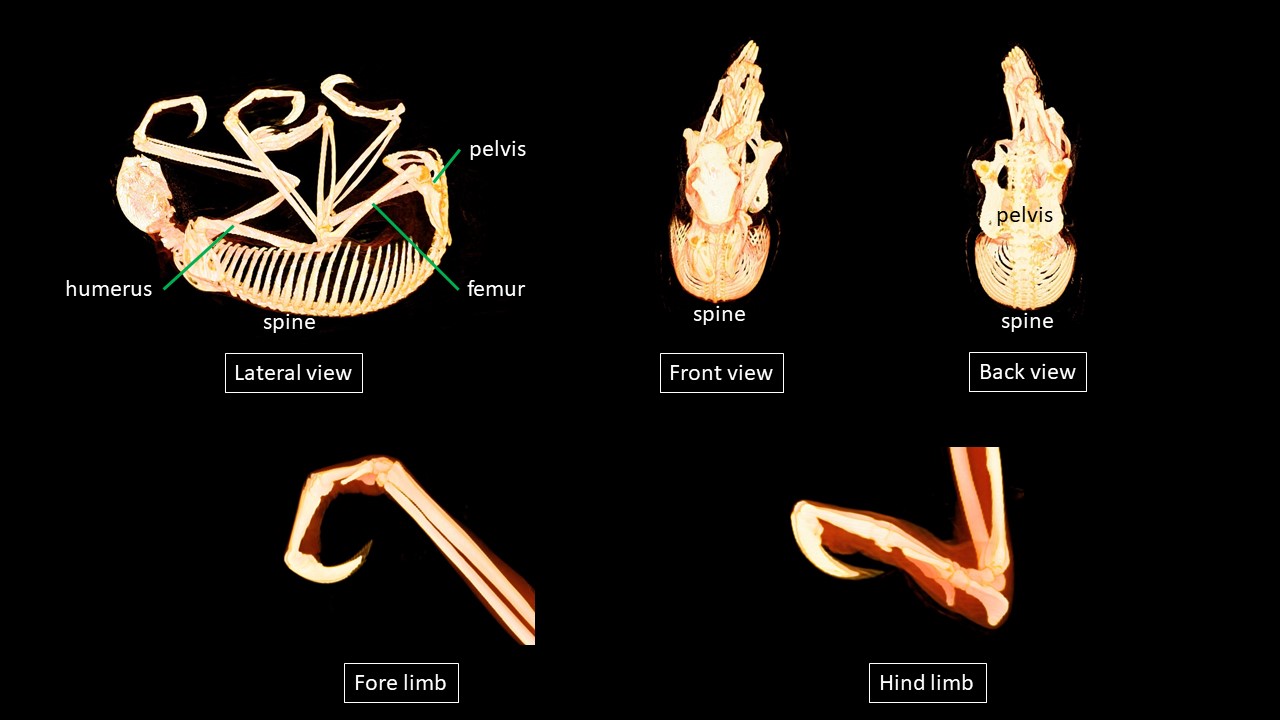
Fig. 25-2 3D CT scans of a two-toed sloth.
Many primates are arboreal or semi-arboreal, and support themselves in trees using prehensile hands and feet to grip the trunk and braches. Many are extremely agile and climb almost any gradient. The free-climbing technique used by macaques is similar to that used by humans who participate in sport climbing, and involves strong, skilful fingering with support provided by both the fore- and hind limbs.

Fig. 26 Free climbing of Japanese macaque.
The Himalayan takin is typical of a number of wild goats and goat-antelopes (including for example the American mountain goat, Himalayan tahr, Alpine chamois and markhor) which have taken the climbing potential of the hoofed mammal body plan to extremes. These extraordinary ungulates are able to scale near-vertical cliffs and move assuredly over exposed steep ground, finding support in the tiniest of ledges and footholds. The feet of climbing goat antelopes typically have two spreading toes, the pads of which are covered with tough but flexible skin to maximize friction. The toes are edged with tough, sharp-edged hoofs that can snag even the tiniest irregularities in rock faces to give traction. A short, thick neck and short, muscular legs help maintain body balance, while also allowing the animal to leap well (Fig.27-2,ref.1,ref.2).

Fig. 27-1 Takin walks by
posture in which its pelvic girdle is lowered.
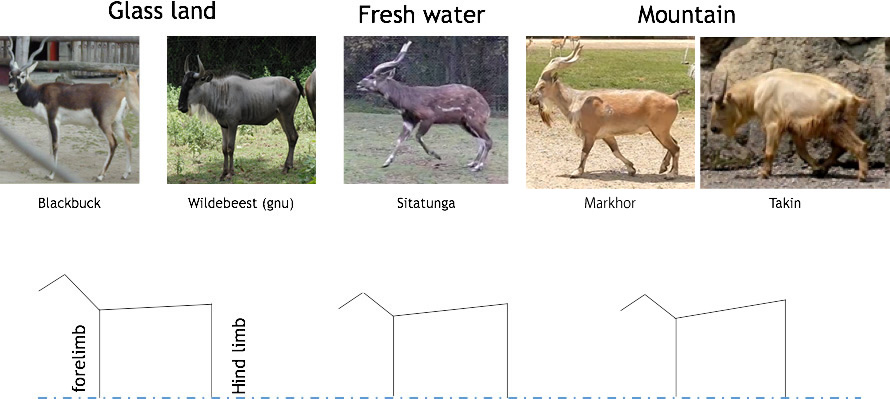
Fig. 27-2 Comparing the
forms of antelopes from different habitats – the grass land specialists blackbuck and wildebeest,
the water-loving sitatunga and the montane chamois and Takin. Note the long hind legs and
conspicuous slope of the back in the climbing goat antelopes.